Research
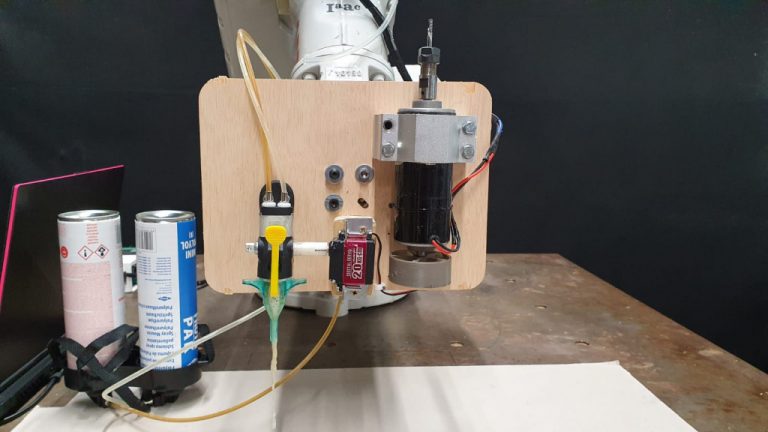
Idea was to develop an end effector which can be multitasking. We used PU foam for additive manufacturing and CNC milling spindle for subtractive manufacturing.

This project was a part of a seminar during my masters, main intention was to investigate passive cooling systems based on examples in traditional terracotta facades and contemporary cooling installations.
The aim was to explore the characteristics of clay, the use of wire-cutting to subtract and re-aggregate the prefabricated given shapes and the possibilities of combining these with the precision of robotic fabrication and finally create a 1:1 scale prototype from clay extrusions usually known from the use as façade cladding.
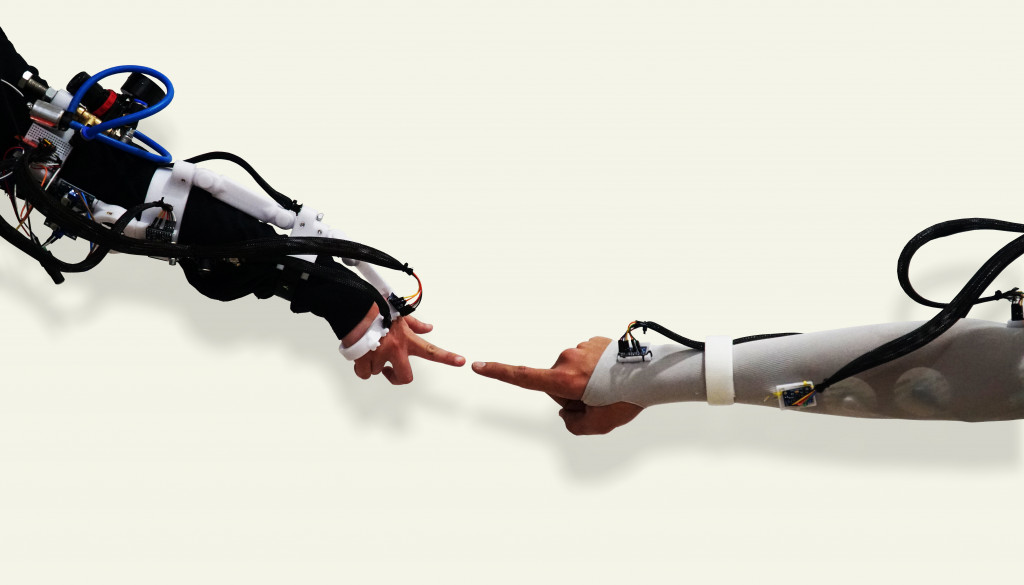
The aim of this project was to develop wearable assistive robotics for transferring human motion from one person to another. We focused on developing a wearable exoskeleton arm using EMG and IMU sensors.

Project aim was to explore potentials of ROS and how ROS can play important role in converting a normal drone to a mapping drone. the same is applicable to UGV and other robots. ORB_SLAM is used to generate point clouds in real-time using a monocular camera. It has the capability of loop closure, map saving, and using the same map to improve the quality of the point cloud/model. The final goal of the project is to create autonomous photogrammetry with ROS

This project uses waste ceramic tile pieces and accommodate them in the design which is robotically assembled. Tile pieces are detected using OpenCV and assembled using UR10 robotic manipulator. The term “CRACKS” was inspired by the crack pattern mosaic which brings an amazingly mesmerizing architectural outcome and can be merged in internal and external architecture such as water features, bathrooms, etc. The main focus of this project was to use waste ceramic tiles and assemble them using the UR-Robotic arm. Setup consist of Grasshopper, Compas_fab, ROS, OpenCV
This project comes to celebrate the new opportunities that can emerge when expanding barriers – between the craftsman and the Robot, The analog and the Digital, The physical and the visual. The main idea of this project was to : Record human motion and use it to perform tasks using robotic arm in real time. Create a connection between the artist performance and the spectator by using projection mapping.
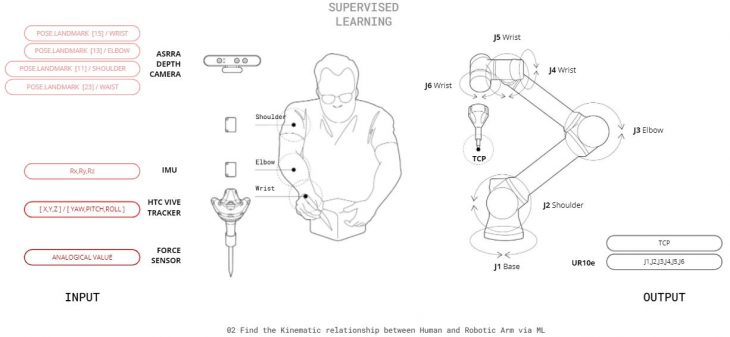
The idea was to use tools/sensors such as RGBD camera and mediapipe, HTC vive tracker, IMU and record the human motions within human workspace. The recorded data is used to feed in a Neural network in grasshopper with a meaningful translation of human pose to robots joint pose. Mediapipe is a open source algorithm that detect human body pose with use of a normal RGB camera or a RGBD camera. Human joint pose/locations can be extracted with mediapipe. Human participant works on a 2d surface in human workspace and robotic arm will work in real-time on piece of clay (400 x 400 mm) in robotic workspace
This project was a output of intense 1 week workshop The main was to design using machine learning. The teams had to create a modular design composed of small identical cells. Each cell had to be assembled using 4mm rebar. Using the base design of a cell and controlling parameters, the machine learning algorithm was able to generate cells which would fit inside the different parts of the final design. Structural calculations were also linked to the machine learning (using grasshopper and owl) algorithm & using Karamba which resulted in structurally stable final outputs. Furthermore the workshop was accompanied by a fabrication workflow, where the free form space frame structure developed were fabricated by a robotic bending process. In addition to optimization, workflows with machine fabrication workflows were developed.

This project focuses on using a computational approach to designing the louvers of a façade and leveraging robotics as a means of their fabrication while studying methods to approximate material behavior. Fabrication process consist of picking metal strip with robotic vacuum gripper and feeding in a hydraulic press which is equipped with a custom made creasing tool. With each pass creasing metal strip gets creased. Increase in intensity results in more curved strip. Curvature can be controller with curve angles, density of curve lines on strip. This project has been selected for eCAADe 2022 initial submission. Final submission
is in progress.
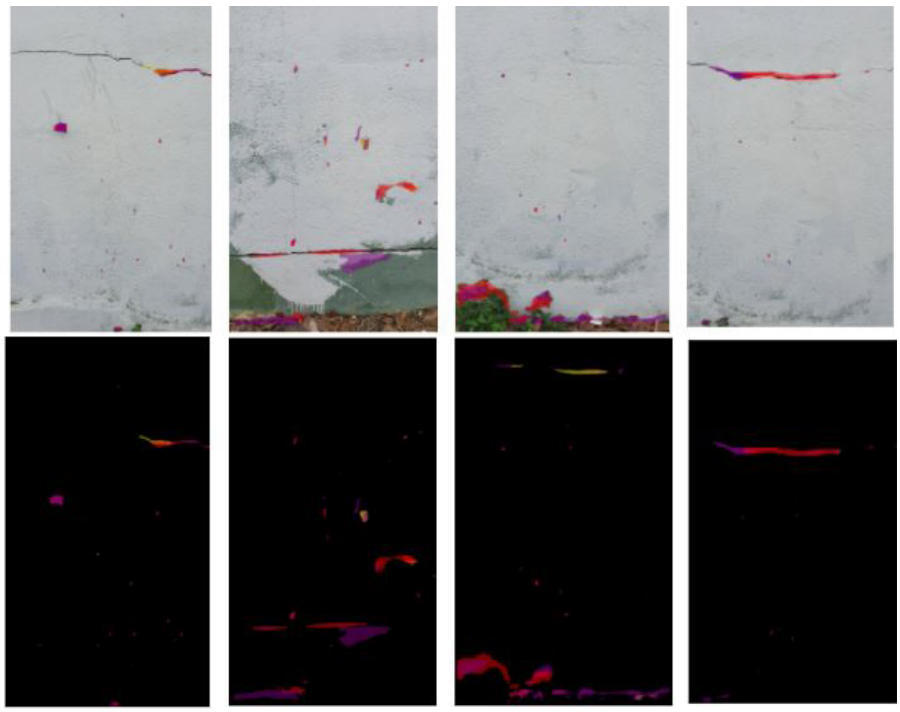
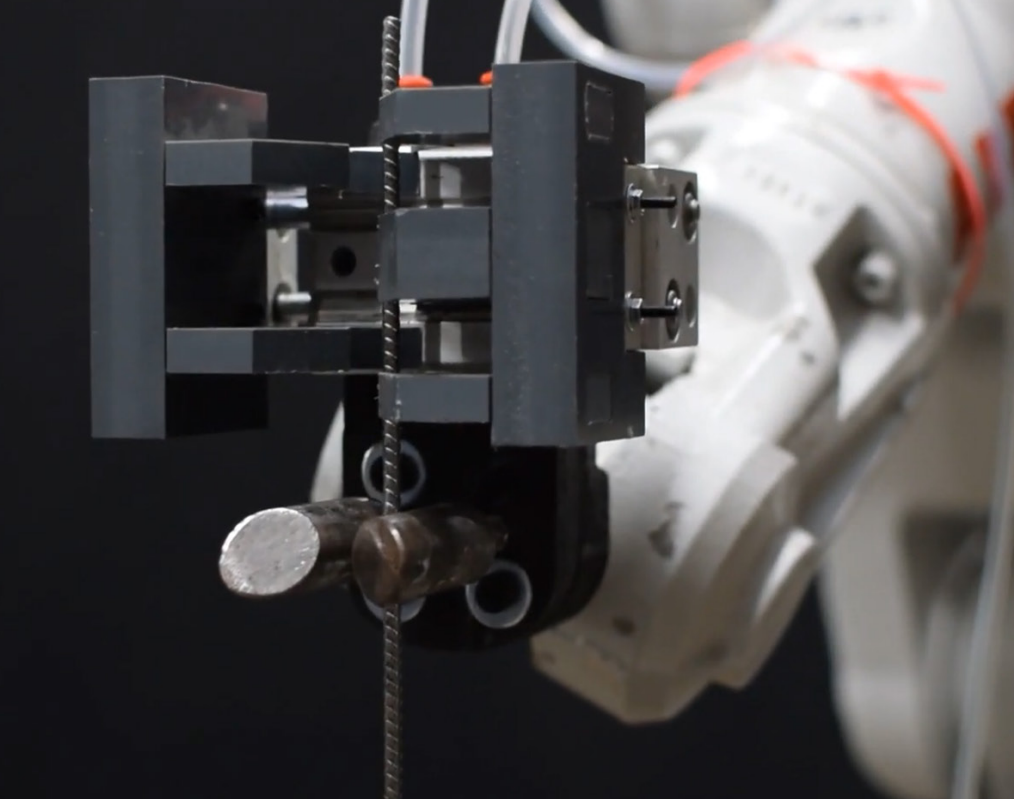
CONCRETE PUNK project aimed at redefining computer vision and machine learning applications in construction industry. Through this project we intend to create automated/semi-automated system that scans and identifies cracks in existing concrete elements using novel computer vision, machine learning techniques further to which a Ultrasonic pulse velocity test performed using automated/semiautomated robotic system over the targeted areas detected by machine learning and as a result structural state of the element can be determined and healed using biological methods.